
8.3 Solving Equations Involving Trigonometric Functions
8.3.1 Solving Equations Using the Inverse Trigonometric Functions
In Sections 7.2.2 and 7.4, we learned how to solve equations like  and
and  . In each case, we ultimately appealed to the Unit Circle and relied on the fact that the answers corresponded to a set of `common angles’ listed in Section 7.2.
. In each case, we ultimately appealed to the Unit Circle and relied on the fact that the answers corresponded to a set of `common angles’ listed in Section 7.2.
If, on the other hand, we had been asked to find all angles with  or solve
or solve  for real numbers
for real numbers  , we would have been hard-pressed to do so. With the introduction of the inverse trigonometric functions, however, we are now in a position to solve these equations.
, we would have been hard-pressed to do so. With the introduction of the inverse trigonometric functions, however, we are now in a position to solve these equations.
A good parallel to keep in mind is how the square root function can be used to solve certain quadratic equations. The equation  is a lot like in that it has friendly, `common value’ answers
is a lot like in that it has friendly, `common value’ answers  . The equation
. The equation  , on the other hand, is a lot like . We know there are answers, but we can’t express them using `friendly’ numbers.
, on the other hand, is a lot like . We know there are answers, but we can’t express them using `friendly’ numbers.
To solve , we make use of the square root function (which is an inverse to  on a restricted domain) and write our answer as
on a restricted domain) and write our answer as  . We need the
. We need the  to adjust for the fact that
to adjust for the fact that  is defined to be positive only, but we know we have two solutions, one positive and one negative. Using a calculator, we can certainly approximate the values
is defined to be positive only, but we know we have two solutions, one positive and one negative. Using a calculator, we can certainly approximate the values  , but as far as exact answers go, we leave them as .
, but as far as exact answers go, we leave them as .
In the same way, we will use the arcsine function (the inverse to the sine function on a restricted domain) to solve . However, we will need to adjust for the fact that there is more than one answer to this equation (infinitely many, in fact!) As it turns out, we will be able to express every solution in terms of  , as our next example illustrates.
, as our next example illustrates.
Example 8.3.1
Example 8.3.1.1
Solve the following equations.
Determine all angles  for which .
for which .
Solution:
Determine all angles for which .
If , then the terminal side of , when plotted in standard position, intersects the Unit Circle at  . Geometrically, we see that this happens at two places: in Quadrant I and Quadrant II.
. Geometrically, we see that this happens at two places: in Quadrant I and Quadrant II.
If we let  denote the acute solution to the equation, then all the solutions to this equation in Quadrant I are coterminal with , and serves as the reference angle for all of the solutions to this equation in Quadrant II as seen next.
denote the acute solution to the equation, then all the solutions to this equation in Quadrant I are coterminal with , and serves as the reference angle for all of the solutions to this equation in Quadrant II as seen next.

Considering  isn’t the sine of any of the `common angles’ we’ve encountered, we use the arcsine functions to express our answers. By definition, there exists a real number
isn’t the sine of any of the `common angles’ we’ve encountered, we use the arcsine functions to express our answers. By definition, there exists a real number  such that
such that  with
with  .
.
Hence,  radians is an acute angle with
radians is an acute angle with  . Because all of the Quadrant I solutions are all coterminal with , we get
. Because all of the Quadrant I solutions are all coterminal with , we get
![\[ \begin{array}{rcl} \theta &=& \alpha + 2\pi k \\[4pt] &=& \arcsin\left(\frac{1}{3}\right) + 2\pi k \text{ for integers } k \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-44337fb372fdde2bd760b04fa8b999b7_l3.png "Rendered by QuickLaTeX.com")
Turning our attention to Quadrant II, we get one solution to be  . Hence, the Quadrant II solutions are
. Hence, the Quadrant II solutions are
![\[ \begin{array}{rcl} \theta &=& \pi - \alpha + 2\pi k \\[4pt] &=& \pi - \arcsin\left(\frac{1}{3}\right) + 2\pi k \text{ for integers } k \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-0054ff9b26b13be1576e4c9baaea44a9_l3.png "Rendered by QuickLaTeX.com")
Example 8.3.1.2
Solve the following equations.
Determine all real numbers for which .
Solution:
Determine all real numbers for which .
The real number solutions to  correspond to angles with
correspond to angles with  . Due to the fact that tangent is negative only in Quadrants II and IV, we focus our efforts there.
. Due to the fact that tangent is negative only in Quadrants II and IV, we focus our efforts there.
The real number  satisfies and
satisfies and  . If we let
. If we let  radians, then all of the Quadrant IV solutions to are coterminal with
radians, then all of the Quadrant IV solutions to are coterminal with  .
.

Moreover, the solutions from Quadrant II differ by exactly  units from the solutions in Quadrant IV (recall, the period of the tangent function is .) Hence, all of the solutions to are of the form
units from the solutions in Quadrant IV (recall, the period of the tangent function is .) Hence, all of the solutions to are of the form  for some integer
for some integer  . Switching back to the variable , we record our final answer to as
. Switching back to the variable , we record our final answer to as
![\[ \begin{array}{rcl} t = \arctan(-2) + \pi k \text{ for integers } k \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-fd4a37521e4e91dcad32513fbe0a32f0_l3.png "Rendered by QuickLaTeX.com")
Another tact we could have taken to solve this problem is to use reference angles. Consider the (angle) equation: . If we let be the reference angle for the solutions , we know is an acute angle with 
By definition, the real number  satisfies with
satisfies with  . Hence, the angle
. Hence, the angle  radians is the reference angle for our solutions to .
radians is the reference angle for our solutions to .
Adjusting for quadrants, we get our answers to are  for integers . Again, we cosmetically change the variable from back to so our answer to is
for integers . Again, we cosmetically change the variable from back to so our answer to is  . Thanks to the odd property of arctangent,
. Thanks to the odd property of arctangent,  and we see this family of solutions is identical to what we obtained earlier.
and we see this family of solutions is identical to what we obtained earlier.

Example 8.3.1.3
Solve the following equations.
Solve  for
for  .
.
Solution:
Solve for .
In the last equation,  , we are not told whether or not represents an angle or a real number. This isn’t really much of an issue, as we attack both problems the same way.
, we are not told whether or not represents an angle or a real number. This isn’t really much of an issue, as we attack both problems the same way.
Taking a cue from our work in Section 7.4 and use a Reciprocal Identity to convert the equation to  . Thinking geometrically, we are looking for angles with
. Thinking geometrically, we are looking for angles with  . As
. As  , we are looking for solutions in Quadrants II and III. Due to the fact that
, we are looking for solutions in Quadrants II and III. Due to the fact that  isn’t the cosine of any of the `common angles’, we’ll need to express our solutions in terms of the arccosine function.
isn’t the cosine of any of the `common angles’, we’ll need to express our solutions in terms of the arccosine function.

The real number  is defined so that
is defined so that  with
with  . Hence, the angle
. Hence, the angle  radians is a Quadrant II angle which satisfies
radians is a Quadrant II angle which satisfies  . To obtain a Quadrant III angle solution, we may simply use
. To obtain a Quadrant III angle solution, we may simply use  .
.
All angle solutions are coterminal with or  , so we get our solutions to to be
, so we get our solutions to to be  or
or  for integers .
for integers .
Switching back to the variable , we record our final answer to as
![\[ x = \arccos\left(-\frac{3}{5}\right) + 2\pi k \text{ or } x = -\arccos\left(-\frac{3}{5}\right) + 2\pi k \text{ for integers } k \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-9c97baa1f358166ed38d9f9990138c92_l3.png "Rendered by QuickLaTeX.com")
As with the previous problem, we can approach solving using reference angles. Letting represent the reference angle for the solutions , we know is an acute angle with  .
.
We know the real number  satisfies
satisfies  and , hence
and , hence  radians is the reference angle for the solutions to .
radians is the reference angle for the solutions to .
Hence, the Quadrant II solutions to are  while the Quadrant IV solutions to are
while the Quadrant IV solutions to are  for integers .
for integers .

Shifting back to the variable , we get our solution to are
![\[ x = \pi - \arccos\left( \frac{3}{5} \right) + 2\pi k \text{or } x = \pi + \arccos\left( \frac{3}{5} \right) + 2\pi k \text{ for integers } k \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-b8b7b01c4d0588d318548bdda8484c04_l3.png "Rendered by QuickLaTeX.com")
While these certainly look quite different than what we obtained before,  or
or  for integers , they are, in fact, equivalent. To show this, we start with
for integers , they are, in fact, equivalent. To show this, we start with  and begin writing out specific solutions from each family by choosing specific values of . We leave these details to the reader.
and begin writing out specific solutions from each family by choosing specific values of . We leave these details to the reader.
Example 8.3.2
Example 8.3.2.1
Consider the function  . Write a formula for
. Write a formula for  in the form
in the form  for
for  .
.
Solution:
Consider the function . Write a formula for in the form for .
As in Example 8.2.7, we compare the expanded form of  with . We identify
with . We identify  and
and  and by equating coefficients of
and by equating coefficients of  and
and  get the two equations:
get the two equations:  and
and  .
.
Using the Pythagorean Identity to eliminate  , we get
, we get  . We choose
. We choose  and work to find .
and work to find .
Substituting into our two equations relating  and , we get
and , we get  , or
, or  and
and  , so
, so  . As both
. As both  and
and  are positive, we know is a Quadrant I angle. However, because neither the sine nor cosine value of corresponds to a common angle, we need to express in terms of either an arcsine or arccosine.
are positive, we know is a Quadrant I angle. However, because neither the sine nor cosine value of corresponds to a common angle, we need to express in terms of either an arcsine or arccosine.
As the real number  satisfies and , we know the angle
satisfies and , we know the angle  radians is an acute (Quadrant I) angle which satisfies .
radians is an acute (Quadrant I) angle which satisfies .
Hence, we can take  and write
and write
![\[f(t) = 5 \cos\left(6t + \arccos\left(\frac{3}{5}\right) \right)\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-39c11e7ff850acfd74eea0f5e2526e5c_l3.png "Rendered by QuickLaTeX.com")
In addition, the real number  satisfies
satisfies  and . Hence
and . Hence  radians is Quadrant I angle with .
radians is Quadrant I angle with .
This means we could also take and write
![\[f(t) = 5 \cos\left(6t + \arcsin\left(\frac{4}{5}\right) \right)\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-8158a40b8f4de7803d55c4f67c7a828d_l3.png "Rendered by QuickLaTeX.com")
(We could also express in terms of arctangents, if we wanted!)
We leave it to the reader to verify (both) solutions analytically and graphically.
Example 8.3.2.2
Consider the function . Write a formula for in the form  for .
for .
Solution:
Consider the function . Write a formula for in the form for .
Once again, we equate the expanded form of  with . Once again, we get and . Here, our two equations for and are
with . Once again, we get and . Here, our two equations for and are  and
and  .
.
As before, we get  , and we choose . Our equations for become:
, and we choose . Our equations for become:  and
and  . Because
. Because  but
but  , we know is a Quadrant II angle. As before, neither the sine nor cosine value of corresponds to a common angle, so we need to express in terms of either an arcsine or arccosine.
, we know is a Quadrant II angle. As before, neither the sine nor cosine value of corresponds to a common angle, so we need to express in terms of either an arcsine or arccosine.
Here, we opt to use the arccosine function, because the range of arccosine, ![[0, \pi]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-c9ca29640949e01de0b035a77efdc714_l3.png "Rendered by QuickLaTeX.com") covers Quadrant II. From , we get
covers Quadrant II. From , we get  , so
, so
![\[f(t) = 5 \sin\left(6t + \arccos\left(-\frac{4}{5}\right) \right)\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-a6d3a9abcb1031086479c2add31f1a22_l3.png "Rendered by QuickLaTeX.com")
Had we chosen to work with arcsines, we would need a Quadrant II solution to . Going through the usual machinations, we arrive at  . Hence, an alternative form of our answer is
. Hence, an alternative form of our answer is  . We leave the checks to the reader.
. We leave the checks to the reader.
8.3.2 Strategies for Solving Equations Involving Circular Functions
In Sections 7.2.2, 7.4 and in the previous subsection, we solved some basic equations involving the trigonometric functions. Below we summarize the techniques we’ve employed thus far. Note that we use the neutral letter ` ‘ as the argument of each circular function for generality.
‘ as the argument of each circular function for generality.
Strategies for Solving Basic Equations Involving the Circular Functions
- To solve
 or
or  for
for  , first solve for in the interval
, first solve for in the interval  and add integer multiples of the period
and add integer multiples of the period  . If
. If  or if
or if  , there are no real solutions.
, there are no real solutions. - To solve
 or
or  for
for  or
or  , convert to cosine or sine, respectively, and solve as above. If
, convert to cosine or sine, respectively, and solve as above. If  , there are no real solutions.
, there are no real solutions. - To solve
 for any real number
for any real number  , first solve for in the interval
, first solve for in the interval  and add integer multiples of the period .
and add integer multiples of the period . - To solve
 for
for  , convert to tangent and solve as above. If
, convert to tangent and solve as above. If  , the solution to
, the solution to  is
is  for integers .
for integers .
Using the above guidelines, we can comfortably solve  and find the solution
and find the solution  or
or  for integers . But how do we solve the related equation
for integers . But how do we solve the related equation  ?
?
This equation has the form  , so we know the solutions take the form
, so we know the solutions take the form  or
or  for integers . Because the argument of sine here is
for integers . Because the argument of sine here is  , we have
, we have  or
or  .
.
To solve for , we divide both sides[1] of these equations by  , and obtain
, and obtain  or
or  for integers . This is the technique employed in the example below.
for integers . This is the technique employed in the example below.
Example 8.3.3
Example 8.3.3.1
Solve the following equations and check your answers analytically. List the solutions which lie in the interval and verify them using a graphing utility.

Solution:
Solve for . List the solutions which lie in the interval .
The solutions to  are or
are or  for integers .
for integers .
As the argument of cosine here is  , this means
, this means
![\[2\theta = \frac{5\pi}{6} + 2\pi k \text{ or } 2\theta = \frac{7\pi}{6} + 2\pi k \text{ for integers } k \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-dd548de1498f922e26bc0e86ef50dfc4_l3.png "Rendered by QuickLaTeX.com")
Solving for gives
![\[\theta = \frac{5\pi}{12} + \pi k \text{ or } \theta = \frac{7\pi}{12} + \pi k \text{ for integers } k\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-ebda762438e1dbccd07a7d5d9f32856b_l3.png "Rendered by QuickLaTeX.com")
To check these answers analytically, we substitute them into the original equation. For any integer :
![\[ \begin{array}{rclr} \cos\left( 2\left[\frac{5\pi}{12} + \pi k\right]\right) & = & \cos\left(\frac{5\pi}{6} + 2\pi k\right) & \\ [3pt] & = & \cos\left(\frac{5\pi}{6}\right) & \text{the period of cosine is } 2\pi \\ [3pt] & = & -\frac{\sqrt{3}}{2} & \\ \end{array}\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-cb04ff34afc8a61c12b9df7a1e0e45f4_l3.png "Rendered by QuickLaTeX.com")
Similarly, we find ![\cos\left( 2\left[\frac{7\pi}{12} + \pi k\right]\right) = \cos\left(\frac{7\pi}{6} + 2\pi k\right) = \cos\left(\frac{7\pi}{6}\right) = -\frac{\sqrt{3}}{2}](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-51e127b962636789443fbb1bcfccdea9_l3.png "Rendered by QuickLaTeX.com") .
.
To determine which of our solutions lie in , we substitute integer values for . The solutions we keep come from the values of  and
and  and are
and are
![\[\theta = \frac{5\pi}{12}, \, \frac{7\pi}{12}, \, \frac{17\pi}{12} \text{ and } \frac{19\pi}{12} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-264822148df9af41758c24d8b0b6fbef_l3.png "Rendered by QuickLaTeX.com")
Using technology, we graph  and
and  over and examine where these two graphs intersect to verify our answers.
over and examine where these two graphs intersect to verify our answers.

Example 8.3.3.2
Solve the following equations and check your answers analytically. List the solutions which lie in the interval and verify them using a graphing utility.

Solution:
Solve for . List the solutions which lie in the interval .
This equation has the form  , so we rewrite it as
, so we rewrite it as  and find
and find  or
or  for integers .
for integers .
The argument of cosecant here is  , thus
, thus
![\[\frac{1}{3}\theta-\pi = \frac{\pi}{4} + 2\pi k \text{ or } \frac{1}{3}\theta - \pi = \frac{3\pi}{4} + 2\pi k \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-bf7ebd3c0d4d4b66f6074079c4d21068_l3.png "Rendered by QuickLaTeX.com")
To solve  , we first add to both sides to get
, we first add to both sides to get  . A common error is to treat the `
. A common error is to treat the ` ‘ and `‘ terms as `like’ terms and try to combine them when they are not.
‘ and `‘ terms as `like’ terms and try to combine them when they are not.
We can, however, combine the `‘ and ` ‘ terms to get
‘ terms to get  .
.
We now finish by multiplying both sides by to get
![\[\theta = 3 \left( \frac{5\pi}{4} + 2\pi k \right) = \frac{15 \pi}{4} + 6\pi k\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-37305d9bb2a7ae4df465d7f95a748f4d_l3.png "Rendered by QuickLaTeX.com")
where , as always, runs through the integers.
Solving the other equation,  produces
produces
![\[\theta = \frac{21\pi}{4} + 6 \pi k \text{ for integers } k \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-15ccc5e34a060d5260a65cddba51a366_l3.png "Rendered by QuickLaTeX.com")
To check the first family of answers, we substitute, combine like terms, and simplify.
![\[ \begin{array}{rclr} \csc\left(\frac{1}{3} \left[ \frac{15\pi}{4} + 6 \pi k \right] - \pi \right) & = & \csc\left(\frac{5\pi}{4} + 2\pi k - \pi \right) & \\ [3pt] & = & \csc\left(\frac{\pi}{4} + 2\pi k\right) & \\ [3pt] & = & \csc\left(\frac{\pi}{4}\right) & \text{the period of cosecant is } 2\pi \\ & = & \sqrt{2} & \\ \end{array}\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-34db32d607ef0b900c8d55c28fa985d1_l3.png "Rendered by QuickLaTeX.com")
The family  checks similarly.
checks similarly.
Despite having infinitely many solutions, we find that none of them lie in .
To verify this graphically, we check that  and
and  do not intersect at all over the interval .
do not intersect at all over the interval .

Example 8.3.3.3
Solve the following equations and check your answers analytically. List the solutions which lie in the interval and verify them using a graphing utility.

Solution:
Solve for . List the solutions which lie in the interval .
Because  has the form , we know , so, in this case,
has the form , we know , so, in this case,  for integers .
for integers .
Solving for yields  .
.
Checking our answers, we get
![\[ \begin{array}{rclr} \cot\left(3\left[ \frac{\pi}{6} + \frac{\pi}{3} k\right]\right) & = & \cot\left(\frac{\pi}{2} + \pi k\right) & \\ [3pt] & = & \cot\left(\frac{\pi}{2}\right) & \text{the period of cotangent is } \pi \\ [3pt] & = & 0 & \\ \end{array}\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-4f628311755d4bb57ff1876219c8f9e6_l3.png "Rendered by QuickLaTeX.com")
As runs through the integers, we obtain six answers, corresponding to  through
through  , which lie in
, which lie in  :
:
![\[x = \frac{\pi}{6}, \, \frac{\pi}{2}, \, \frac{5\pi}{6}, \, \frac{7\pi}{6}, \, \frac{3\pi}{2} \text{ and }\frac{11\pi}{6} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-b2955ca9b82839d2b91157a4a50d5807_l3.png "Rendered by QuickLaTeX.com")
Graphing  and
and  (the -axis), we confirm our result.[2]
(the -axis), we confirm our result.[2]

Example 8.3.3.4
Solve the following equations and check your answers analytically. List the solutions which lie in the interval and verify them using a graphing utility.

Solution:
Solve for . List the solutions which lie in the interval .
The complication in solving an equation like comes not from the argument of secant, which is just , but rather, the fact the secant is being squared: 
To get this equation to look like one of the forms listed in the box above this example, we extract square roots to get  . Converting to cosines, we have
. Converting to cosines, we have  .
.
For  , we get
, we get
![\[t = \frac{\pi}{3} + 2\pi k \text{ or } t = \frac{5\pi}{3} + 2\pi k \text{ for integers } k \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-8435ebbffc277d6bf7c36993055ee5bf_l3.png "Rendered by QuickLaTeX.com")
For  , we get
, we get
![\[ t = \frac{2\pi}{3} + 2\pi k \text{ or } t = \frac{4\pi}{3} + 2\pi k \text{ for integers } k\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-367210b64a57b77cfb989d75c40c5742_l3.png "Rendered by QuickLaTeX.com")
If we take a step back and think of these families of solutions geometrically, we see we are finding the measures of all angles with a reference angle of  .
.
As a result, these solutions can be combined and we may write our solutions as
![\[t = \frac{\pi}{3} + \pi k \text{ and } t = \frac{2\pi}{3} + \pi k \text{ for integers } k\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-7fe9b0959d5402f1820e787e9c3555b3_l3.png "Rendered by QuickLaTeX.com")
To check the first family of solutions, we note that, depending on the integer ,  doesn’t always equal
doesn’t always equal  . It is true, though, that for all integers ,
. It is true, though, that for all integers ,  . (Can you show this?) Hence, checking our first family of solutions gives:
. (Can you show this?) Hence, checking our first family of solutions gives:
![\[ \begin{array}{rclr} \sec^{2}\left(\frac{\pi}{3} + \pi k\right) & = & \left( \pm \sec\left(\frac{\pi}{3}\right)\right)^2 & \\ [3pt] & = & (\pm 2)^2 & \\ [3pt] & = & 4 & \\ \end{array}\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-85717d88dd0a6c56befd31e69bf2c651_l3.png "Rendered by QuickLaTeX.com")
The check for the family of solutions  is similar.
is similar.
The solutions which lie in come from the values and  , namely
, namely
![\[ t = \frac{\pi}{3}, \,\frac{2\pi}{3}, \, \frac{4\pi}{3} \text{ and } \frac{5\pi}{3} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-d7697431603e051defac400d01164ded_l3.png "Rendered by QuickLaTeX.com")
Graphing  and
and  confirms our results.
confirms our results.

Example 8.3.3.5
Solve the following equations and check your answers analytically. List the solutions which lie in the interval and verify them using a graphing utility.

Solution:
Solve for . List the solutions which lie in the interval .
The equation has the form  , whose solution is
, whose solution is 
Hence,  , so
, so
![\[x = 2\arctan(-3) + 2\pi k \text{ for integers } k\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-c34594b043f449ad6df445362dd8599e_l3.png "Rendered by QuickLaTeX.com")
To check, we note
![\[ \begin{array}{rclr} \tan\left(\frac{2\arctan(-3) + 2\pi k}{2}\right) & = & \tan\left( \arctan(-3) + \pi k \right) & \\ [3pt] & = & \tan\left(\arctan(-3) \right) & \text{the period of tangent is } \pi} \\ [3pt] & = & -3 & \text{See Theorem 7.16} \\ \end{array}\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-52e67172d48c12adc757b1e08eb278f1_l3.png "Rendered by QuickLaTeX.com")
To determine which of our answers lie in the interval , we first need to get an idea of the value of  . While we could easily find an approximation using a calculator, we proceed analytically, as is our custom.
. While we could easily find an approximation using a calculator, we proceed analytically, as is our custom.
To get started, we note that because  , it
, it  . Hence,
. Hence,  . With regard to our solutions,
. With regard to our solutions,  , we see for , we get
, we see for , we get  , so we discard this answer and all answers where
, so we discard this answer and all answers where  .
.
Next, we turn our attention to  and get
and get  . Starting with the inequality , we add through and get
. Starting with the inequality , we add through and get  . This means lies in .
. This means lies in .
Advancing to  produces
produces  . Once again, we get from that
. Once again, we get from that  . This is outside the interval of interest, , so we discard and all solutions of the form for
. This is outside the interval of interest, , so we discard and all solutions of the form for  .
.
Graphically,  and
and  intersect only once on at
intersect only once on at  .
.

Example 8.3.3.6
Solve the following equations and check your answers analytically. List the solutions which lie in the interval and verify them using a graphing utility.

Solution:
Solve for . List the solutions which lie in the interval .
To solve , we first note that it has the form  , which has the family of solutions
, which has the family of solutions  or
or  for integers .
for integers .
The argument of sine here is  , thus we get
, thus we get  or
or  which gives
which gives
![\[x = \frac{1}{2} \arcsin(0.87) + \pi k \text{ or } x =\frac{\pi}{2} - \frac{1}{2}\arcsin(0.87) + \pi k \text{ for integers } k\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e47a13f0bf6a0628c6258c261fa4cb5b_l3.png "Rendered by QuickLaTeX.com")
To check,
![\[ \begin{array}{rclr} \sin\left(2\left[\frac{1}{2} \arcsin(0.87) + \pi k\right]\right) & = & \sin\left(\arcsin(0.87) + 2\pi k\right) & \\ [3pt] & = & \sin\left(\arcsin(0.87)\right) & \text{the period of sine is } 2\pi \\ [3pt] & = & 0.87& \text{See Theorem 7.15} \\ \end{array}\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-27985734993aba2227a857d3a4e4bee7_l3.png "Rendered by QuickLaTeX.com")
For the family  , we get
, we get
![\[ \begin{array}{rclr} \sin\left(2\left[\frac{\pi}{2} - \frac{1}{2} \arcsin(0.87) + \pi k\right]\right) & = & \sin\left(\pi - \arcsin(0.87) + 2\pi k\right) & \\ [3pt] & = & \sin\left(\pi - \arcsin(0.87)\right) & \text{the period of sine is } 2\pi \\ [3pt] & = & \sin\left(\arcsin(0.87)\right) & \sin(\pi - t) = \sin(t) \\ [3pt] & = & 0.87& \text{See Theorem 7.16} \\ \end{array}\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-4bfbec0078d18e027949f7ee70b18944_l3.png "Rendered by QuickLaTeX.com")
To determine which of these solutions lie in , we first need to get an idea of the value of  . Once again, we could use the calculator, but we adopt an analytic route here.
. Once again, we could use the calculator, but we adopt an analytic route here.
By definition,  so that multiplying through by
so that multiplying through by  gives us
gives us 
Starting with the family of solutions  , we use the same kind of arguments as in our solution to number 5 above and find only the solutions corresponding to
, we use the same kind of arguments as in our solution to number 5 above and find only the solutions corresponding to  and lie in :
and lie in :
![\[x = \frac{1}{2} \arcsin(0.87) \text{ and } x = \frac{1}{2} \arcsin(0.87) + \pi \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-da24f8eaa94d31d7440f1a503c277281_l3.png "Rendered by QuickLaTeX.com")
Next, we move to the family for integers . Here, we need to get a better estimate of  . From the inequality
. From the inequality  , we first multiply through by
, we first multiply through by  and then add
and then add  to get
to get  , or
, or 
Proceeding with the usual arguments, we find the only solutions which lie in correspond to and , namely
![\[x =\frac{\pi}{2} - \frac{1}{2}\arcsin(0.87) \text{ and } x = \frac{3\pi}{2} - \frac{1}{2}\arcsin(0.87)\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-d70bbd1cfff4c9f22197f341a6002e78_l3.png "Rendered by QuickLaTeX.com")
All told, we have found four solutions to in :
![\[ \begin{array}{rcl} x &=& \frac{1}{2} \arcsin(0.87) \approx 0.528 \\[4pt] x&=& \frac{1}{2} \arcsin(0.87) + \pi \approx 3.669 \\[4pt] x &=& \frac{\pi}{2} - \frac{1}{2}\arcsin(0.87) \approx 1.043 \\[4pt] x &=& \frac{3\pi}{2} - \frac{1}{2}\arcsin(0.87) \approx 4.185 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-43263617ee5237c2ef5a52969daba0f6_l3.png "Rendered by QuickLaTeX.com")
By graphing  and
and  , we confirm our results.
, we confirm our results.

If one looks closely at the equations and solutions in Example 8.3.3, an interesting relationship evolves between the frequency of the circular function involved in the equation and how many solutions one can expect in the interval . This relationship is explored in Exercise 89.
Each of the problems in Example 8.3.3 featured one circular function. If an equation involves two different circular functions or if the equation contains the same circular function but with different arguments, we will need to employ identities and Algebra to reduce the equation to the same form as those given on in the box above Example 8.3.3. We demonstrate these techniques in the following example.
Example 8.3.4
Example 8.3.4.1
Solve the following equations and list the solutions which lie in the interval . Verify your solutions on graphically.

Solution:
Solve and list the solutions which lie in the interval .
One approach to solving begins with dividing both sides by  . Doing so, however, assumes that
. Doing so, however, assumes that  which means we risk losing solutions.
which means we risk losing solutions.
Instead, we take a cue from Chapter 2 (due to the fact that what we have here is a polynomial equation in terms of  ) and gather all the nonzero terms on one side and factor:
) and gather all the nonzero terms on one side and factor:
![\[ \begin{array}{rclr} 3\sin^{3}(\theta) & = & \sin^{2}(\theta) & \\ 3\sin^{3}(\theta) - \sin^{2}(\theta) & = & 0 & \\ \sin^{2}(\theta) (3 \sin(\theta) - 1) & = & 0 & \text{Factor out } \sin^{2}(\theta) \text{ from both terms} \\ \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-19760b7398e77b16576e8187958fad17_l3.png "Rendered by QuickLaTeX.com")
We get  or
or  , so
, so  or .
or .
The solution to is  ,
,
with  and
and  being the two solutions which lie in .
being the two solutions which lie in .
To solve , we use the arcsine function to get  or
or  for integers .
for integers .
We find the two solutions here which lie in to be  and
and 
To check graphically, we plot  and
and  and identify the -coordinates of the intersection points of these two curves.[3] (Some extra zooming may be required near
and identify the -coordinates of the intersection points of these two curves.[3] (Some extra zooming may be required near  and
and  to verify that these two curves do in fact intersect four times.)
to verify that these two curves do in fact intersect four times.)

Example 8.3.4.2
Solve the following equations and list the solutions which lie in the interval . Verify your solutions on graphically.

Solution:
Solve and list the solutions which lie in the interval .
We see immediately in the equation that there are two different circular functions present, so we look for an identity to express both sides in terms of the same function.
We use the Pythagorean Identity  to exchange
to exchange  for tangents. What results is a quadratic in disguise:[4]
for tangents. What results is a quadratic in disguise:[4]
![\[ \begin{array}{rclr} \sec^{2}(\theta) & = & \tan(\theta) + 3 & \\ 1 + \tan^{2}(\theta) & = & \tan(\theta) + 3 & \text{Given } \sec^{2}(\theta) = 1 + \tan^{2}(\theta)} \\ \tan^{2}(\theta) - \tan(\theta) -2 & = & 0 & \\ u^2 - u - 2 & = & 0 & \text{Let } u = \tan(\theta)} \\ (u + 1)(u - 2) & = & 0 & \\ \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-81a2980242f2b619b00c958c5222de40_l3.png "Rendered by QuickLaTeX.com")
This gives  or
or  . As
. As  , we have
, we have  or
or  .
.
From , we get  for integers .
for integers .
To solve , we employ the arctangent function and get  for integers .
for integers .
From the first set of solutions, we get  and
and  as our answers which lie in .
as our answers which lie in .
Using the same sort of argument we saw in Example 8.3.3, we get  and
and  as answers from our second set of solutions which lie in .
as answers from our second set of solutions which lie in .
We verify our solutions below graphically.

Example 8.3.4.3
Solve the following equations and list the solutions which lie in the interval . Verify your solutions on graphically.

Solution:
Solve and list the solutions which lie in the interval .
The good news is that in the equation , we have the same circular function, cosine, throughout. The bad news is that we have different arguments,  and .
and .
Using the double angle identity  results in another quadratic in disguise:
results in another quadratic in disguise:
![\[ \begin{array}{rclr} \cos(2t) & = & 3\cos(t) - 2 & \\ 2\cos^{2}(t) -1 & = & 3\cos(t) -2 & \cos(2t) = 2\cos^{2}(t) -1 \\ 2\cos^{2}(t) - 3\cos(t) +1 & = & 0 & \\ 2 u^2 - 3 u + 1 & = & 0 & \text{Let } u = \cos(t)\\ (2u - 1)(u - 1) & = & 0 & \\ \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-def2f64d288adf7110fee2948031e1eb_l3.png "Rendered by QuickLaTeX.com")
We get  or
or  , so or
, so or  .
.
Solving , we get  or
or  for integers .
for integers .
From , we get  for integers .
for integers .
are  , , and
, , and  .
.
Graphing  and
and  , we find that the curves intersect in three places on and confirm our results.
, we find that the curves intersect in three places on and confirm our results.

Example 8.3.4.4
Solve the following equations and list the solutions which lie in the interval . Verify your solutions on graphically.

Solution:
Solve and list the solutions which lie in the interval .
While we could approach solving the equation in the same manner as we did the previous two problems, we choose instead to showcase the utility of the Sum to Product Identities.[5]
From , we get  , and it is the presence of
, and it is the presence of  on the right hand side that indicates a switch to a product would be a good move.[6]
on the right hand side that indicates a switch to a product would be a good move.[6]
Using Theorem 8.13, we rewrite  as
as  . Hence, our original equation is equivalent to
. Hence, our original equation is equivalent to  .
.
From , we get either  or
or  = 0.
= 0.
Solving gives  for integers .
for integers .
The solution to  is
is  for integers .
for integers .
The second set of solutions is contained in the first set of solutions,[7] so our final solution to  is for integers .
is for integers .
There are eight of these answers which lie in :
![\[ x = 0, \, \frac{\pi}{4}, \, \frac{\pi}{2}, \, \frac{3\pi}{4}, \, \pi, \, \frac{5\pi}{4}, \, \frac{3\pi}{2}, \text{ and } \frac{7\pi}{4} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-d564c1d3d28ae943025f0dbaaff75093_l3.png "Rendered by QuickLaTeX.com")
Our plot of the graphs of  and
and  below (after some careful zooming) bears this out.
below (after some careful zooming) bears this out.

Example 8.3.4.5
Solve the following equations and list the solutions which lie in the interval . Verify your solutions on graphically.

Solution:
Solve and list the solutions which lie in the interval .
In the equation , we not only have different circular functions involved, but we also have different arguments to contend with.
Using the double angle identity  makes all of the arguments the same and we proceed to gather all of the nonzero terms on one side of the equation and factor.
makes all of the arguments the same and we proceed to gather all of the nonzero terms on one side of the equation and factor.
![\[ \begin{array}{rclr} \sin(2x) & = & \sqrt{3} \cos(x) & \\ 2 \sin(x) \cos(x) & = & \sqrt{3} \cos(x) & \sin(2x) = 2\sin(x) \cos(x) \\ 2\sin(x) \cos(x) - \sqrt{3} \cos(x) & = & 0 & \\ \cos(x) (2 \sin(x) - \sqrt{3}) & = & 0 & \\ \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-5f8b3a28b2febb3681d3e1837bcd31dc_l3.png "Rendered by QuickLaTeX.com")
 or
or  .
.From , we obtain  for integers .
for integers .
From , we get  or
or  for integers .
for integers .
The answers which lie in are  ,
,  , and
, and  , as verified graphically below.
, as verified graphically below.

Example 8.3.4.6
Solve the following equations and list the solutions which lie in the interval . Verify your solutions on graphically.

Solution:
Solve and list the solutions which lie in the interval .
Unlike the previous problem, there seems to be no quick way to get the circular functions or their arguments to match in the equation .
If we stare at it long enough, however, we realize that the left hand side is the expanded form of the sum formula for  . Hence, our original equation is equivalent to
. Hence, our original equation is equivalent to  .
.
Solving, we find  for integers .
for integers .
Two of these solutions lie in :  and
and  .
.
Graphing  and
and  validates our solutions.
validates our solutions.

Example 8.3.4.7
Solve the following equations and list the solutions which lie in the interval . Verify your solutions on graphically.

Solution:
Solve and list the solutions which lie in the interval .
With the absence of double angles or squares, there doesn’t seem to be much we can do with the equation .
However, as the frequencies of the sine and cosine terms are the same, we can rewrite the left hand side of this equation as a sinusoid.
To fit  to the form
to the form  , we use what we learned in Example 8.2.7 and find
, we use what we learned in Example 8.2.7 and find  , ,
, ,  and
and  .
.
Hence, we can rewrite the equation as  , or
, or  .
.
Solving, we get  for integers .
for integers .
Only one of our solutions, , which corresponds to , lies in .
Geometrically, we see that  and
and  intersect just once, supporting our answer.
intersect just once, supporting our answer.

An alternative way to solve this problem is to introduce squares in order to exchange sines and cosines using a Pythagorean Identity.
From we get  so that
so that  . Simplifying, we get:
. Simplifying, we get:  .
.
Substituting  , we get
, we get  which results in the quadratic equation:
which results in the quadratic equation:  .
.
Letting  , we get
, we get  or
or  . We get
. We get  . Solving
. Solving  gives as well as
gives as well as  for integers, .
for integers, .
Of these two families, only solutions of the form checks in our original equation.[8] We leave it the reader to verify this representation of solutions to is equivalent to the one we found previously.
We repeat here the advice given when solving systems of nonlinear equations in Section 6.2 — when it comes to solving equations involving the circular functions, it helps to just try something.
8.3.3 Harmonic Motion
One of the major applications of the circular functions (sinusoids in particular!) in Science and Engineering is the study of harmonic motion, We close this chapter with a brief foray into this topic as it pulls together many important concepts from both Chapters 7 and 8. The equations for harmonic motion can be used to describe a wide range of phenomena, from the motion of an object on a spring, to the response of an electronic circuit. In this subsection, we restrict our attention to modeling a simple spring system. Before we jump into the Mathematics, there are some Physics terms and concepts we need to discuss.
In Physics, `mass’ is defined as a measure of an object’s resistance to straight-line motion whereas `weight’ is the amount of force (pull) gravity exerts on an object. An object’s mass cannot change,[9] while its weight could change. An object which weighs 6 pounds on the surface of the Earth would weigh 1 pound on the surface of the Moon, but its mass is the same in both places. In the English system of units, `pounds’ (lbs.) is a measure of force (weight), and the corresponding unit of mass is the `slug’. In the SI system, the unit of force is `Newtons’ (N) and the associated unit of mass is the `kilogram’ (kg).
We convert between mass and weight using the formula[10]  . Here,
. Here,  is the weight of the object,
is the weight of the object,  is the mass and
is the mass and  is the acceleration due to gravity. In the English system,
is the acceleration due to gravity. In the English system,  , and in the SI system,
, and in the SI system,  . Hence, on Earth a mass of 1 slug weighs 32 lbs. and a mass of 1 kg weighs 9.8 N.[11] Suppose we attach an object with mass to a spring as depicted below.
. Hence, on Earth a mass of 1 slug weighs 32 lbs. and a mass of 1 kg weighs 9.8 N.[11] Suppose we attach an object with mass to a spring as depicted below.
The weight of the object will stretch the spring. The system is said to be in `equilibrium’ when the weight of the object is perfectly balanced with the restorative force of the spring. How far the spring stretches to reach equilibrium depends on the spring’s `spring constant’. Usually denoted by the letter , the spring constant relates the force  applied to the spring to the amount
applied to the spring to the amount  the spring stretches in accordance with Hooke’s Law
the spring stretches in accordance with Hooke’s Law  .
.
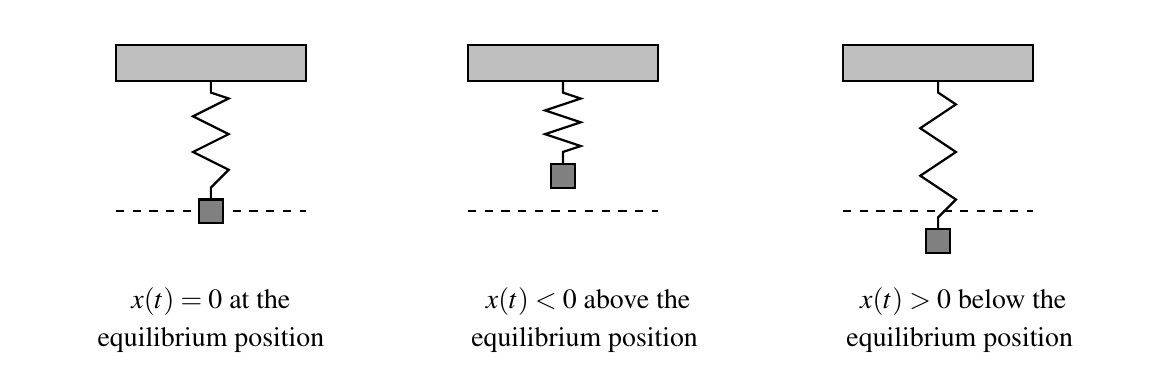
If the object is released above or below the equilibrium position, or if the object is released with an upward or downward velocity, the object will bounce up and down on the end of the spring until some external force stops it. If we let  denote the object’s displacement from the equilibrium position at time , then
denote the object’s displacement from the equilibrium position at time , then  means the object is at the equilibrium position,
means the object is at the equilibrium position,  means the object is above the equilibrium position, and
means the object is above the equilibrium position, and  means the object is below the equilibrium position. The function is called the `equation of motion’ of the object.[12]
means the object is below the equilibrium position. The function is called the `equation of motion’ of the object.[12]
If we ignore all other influences on the system except gravity and the spring force, then Physics tells us that gravity and the spring force will battle each other forever and the object will oscillate indefinitely. In this case, we describe the motion as `free’ (meaning there is no external force causing the motion) and `undamped’ (meaning we ignore friction caused by surrounding medium, which in our case is air).
The following theorem, which comes from Differential Equations, gives as a function of the mass of the object, the spring constant , the initial displacement  of the object and initial velocity
of the object and initial velocity  of the object.
of the object.
As with ,  means the object is released from the equilibrium position,
means the object is released from the equilibrium position,  means the object is released above the equilibrium position and
means the object is released above the equilibrium position and  means the object is released below the equilibrium position. As far as the initial velocity is concerned,
means the object is released below the equilibrium position. As far as the initial velocity is concerned,  means the object is released `from rest,’
means the object is released `from rest,’  means the object is heading upwards and
means the object is heading upwards and  means the object is heading downwards.[13]
means the object is heading downwards.[13]
Theorem 8.14 Equation for Free Undamped Harmonic Motion
Suppose an object of mass is suspended from a spring with spring constant . If the initial displacement from the equilibrium position is and the initial velocity of the object is , then the displacement from the equilibrium position at time is given by  where
where
 and
and 
 and
and 
It is a great exercise in `dimensional analysis’ to verify that the formulas given in Theorem 8.14 work out so that  has units
has units  and has units ft. or m, depending on which system we choose.
and has units ft. or m, depending on which system we choose.
Example 8.3.5
Example 8.3.5.1
Suppose an object weighing 64 pounds stretches a spring 8 feet.
If the object is attached to the spring and released 3 feet below the equilibrium position from rest, find the equation of motion of the object, . When does the object first pass through the equilibrium position? Is the object heading upwards or downwards at this instant?
Solution:
In order to use the formulas in Theorem 8.14, we first need to determine the spring constant and the mass of the object .
To find , we use Hooke’s Law .
We know the object weighs  lbs. and stretches the spring
lbs. and stretches the spring  ft.. Using
ft.. Using  and
and  , we get
, we get
![\[ \begin{array}{rcl} 64 &=& k \cdot 8 \\[4pt] k &=& 8 \frac{\text{lbs.}}{\text{ft.}} \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-500a3f98f8c87df923afeb2f809e967c_l3.png "Rendered by QuickLaTeX.com")
To find , we use with  lbs. and
lbs. and  . We get
. We get  slugs.
slugs.
We can now proceed to apply Theorem 8.14.
If the object is attached to the spring and released 3 feet below the equilibrium position from rest, find the equation of motion of the object, . When does the object first pass through the equilibrium position? Is the object heading upwards or downwards at this instant?
With  and , we get
and , we get  .
.
Because the object is released 3 feet below the equilibrium position `from rest,’  and
and  . Therefore,
. Therefore,  .
.
To determine the phase angle,  , we have , which in this case gives
, we have , which in this case gives  so
so  . Only
. Only  and angles coterminal to it satisfy this condition, so we pick[14] .
and angles coterminal to it satisfy this condition, so we pick[14] .
Hence, the equation of motion is  .
.
To find when the object passes through the equilibrium position we solve  . Going through the usual analysis we find
. Going through the usual analysis we find  for integers .
for integers .
We are interested in the first time the object passes through the equilibrium position, so we look for the smallest positive value which in this case is  seconds after the start of the motion.
seconds after the start of the motion.
Common sense suggests that if we release the object below the equilibrium position, the object should be traveling upwards when it first passes through it. To check this answer, we graph one cycle of . Because our applied domain in this situation is  , and the period of is
, and the period of is  , we graph over the interval
, we graph over the interval ![[0,\pi]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-bb159b8a07cfa44bd834f06db49a3640_l3.png "Rendered by QuickLaTeX.com") . Remembering that means the object is below the equilibrium position and means the object is above the equilibrium position, the fact our graph is crossing through the -axis from positive to negative at
. Remembering that means the object is below the equilibrium position and means the object is above the equilibrium position, the fact our graph is crossing through the -axis from positive to negative at  confirms our answer.
confirms our answer.

Example 8.3.5.2
Suppose an object weighing 64 pounds stretches a spring 8 feet.
If the object is attached to the spring and released 3 feet below the equilibrium position with an upward velocity of feet per second, find the equation of motion of the object, . What is the longest distance the object travels above the equilibrium position? When does this first happen? Confirm your result using a graphing utility.
Solution:
In order to use the formulas in Theorem 8.14, we first need to determine the spring constant and the mass of the object .
To find , we use Hooke’s Law .
We know the object weighs lbs. and stretches the spring ft.. Using and , we get
To find , we use with lbs. and . We get slugs.
We can now proceed to apply Theorem 8.14.
If the object is attached to the spring and released 3 feet below the equilibrium position with an upward velocity of feet per second, find the equation of motion of the object, . What is the longest distance the object travels above the equilibrium position? When does this first happen? Confirm your result using a graphing utility.
The only difference between this problem and the previous problem is that we now release the object with an upward velocity of  . We still have
. We still have  and , but now we have
and , but now we have  , the negative indicating the velocity is directed upwards.
, the negative indicating the velocity is directed upwards.
Here, we get  . From , we get
. From , we get  which gives
which gives  . From , we get
. From , we get  , or
, or  .
.
Hence, is a Quadrant II angle which we can describe in terms of either arcsine or arccosine. The range of arccosine covers Quadrant II, so we choose to express in terms of the arccosine:  .
.
Hence,  .
.
As the amplitude of is  , the object will travel at most feet above the equilibrium position. To find when this happens, we solve the equation
, the object will travel at most feet above the equilibrium position. To find when this happens, we solve the equation  , the negative once again signifying that the object is above the equilibrium position.
, the negative once again signifying that the object is above the equilibrium position.
Going through the usual machinations, we get  for integers .
for integers .
The smallest (positive) of these values occurs when , that is,  seconds after the start of the motion.
seconds after the start of the motion.
Graphing  , we find the coordinates of the first relative minimum of to be approximately
, we find the coordinates of the first relative minimum of to be approximately 

Though beyond the scope of this course, it is possible to model the effects of friction and other external forces acting on the system.[15]
While we may not have the Physics and Calculus background to derive equations of motion for these scenarios, we can certainly analyze them. We examine three cases in the following example.
Example 8.3.6
Example 8.3.6.1
Write  in the form
in the form  . Graph using technology.
. Graph using technology.
Solution:
Write in the form . Graph using technology.
We start rewriting by factoring out  from both terms to get
from both terms to get  . We convert what’s left in parentheses to the required form using the technique introduced in Example 8.2.1 from Section 8.2. We find
. We convert what’s left in parentheses to the required form using the technique introduced in Example 8.2.1 from Section 8.2. We find  so that
so that
![\[x(t) = 10e^{-t/5} \sin\left(t + \frac{\pi}{3}\right)\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-f669a7c4ef310cf4b3752c8b4a8af7cf_l3.png "Rendered by QuickLaTeX.com")
Graphing reveals some interesting behavior. The sinusoidal nature continues indefinitely, but it is being attenuated. In the sinusoid  , the coefficient of the sine function is the amplitude. In the case of
, the coefficient of the sine function is the amplitude. In the case of  , we can think of the function
, we can think of the function  as the amplitude.[16] As
as the amplitude.[16] As  ,
,  which means the amplitude shrinks towards zero.
which means the amplitude shrinks towards zero.
Indeed, if we graph  along with , we see this attenuation taking place with the exponentials acting as a `wave envelope.’
along with , we see this attenuation taking place with the exponentials acting as a `wave envelope.’

In this case, the function corresponds to the motion of an object on a spring where there is a slight force which acts to `damp’, or slow the motion. An example of this kind of force would be the friction of the object against the air. According to this model, the object oscillates forever, but with increasingly smaller and smaller amplitude.
Example 8.3.6.2
Write  in the form
in the form  . Graph using technology.
. Graph using technology.
Solution:
Write in the form . Graph using technology.
Proceeding as in the first example, we factor out  from each term in the function to get
from each term in the function to get  . We find
. We find  , so an equivalent form of is
, so an equivalent form of is
![\[x(t) = 2(t+3) \sin\left(2t + \frac{\pi}{4}\right)\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-a6f18c71ff623b60c9f69f2ae8b0c039_l3.png "Rendered by QuickLaTeX.com")
Graphing , we find the sinusoid’s amplitude growing. This isn’t too surprising because our amplitude function here is  , grows without bound as .
, grows without bound as .

The phenomenon illustrated here is `forced’ motion. That is, we imagine that the entire apparatus on which the spring is attached is oscillating as well.
In this particular case, we are witnessing a `resonance’ effect — the frequency of the external oscillation matches the frequency of the motion of the object on the spring. In a mechanical system, this will result in some sort of structural failure.[17]
Example 8.3.6.3
Compute the period of  . Graph using technology.
. Graph using technology.
Solution:
Compute the period of . Graph using technology.
Last, but not least, we come to  . To find the period of this function, we need to determine the length of the smallest interval on which both
. To find the period of this function, we need to determine the length of the smallest interval on which both  and
and  complete a whole number of cycles.
complete a whole number of cycles.
To do this, we take the ratio of their frequencies and reduce to lowest terms:  . This tells us that for every cycles
. This tells us that for every cycles  makes, makes
makes, makes  . Hence, the period of is three times the period of (which is four times the period of
. Hence, the period of is three times the period of (which is four times the period of  ), or .
), or .
We check our work by graphing over
The reader may recognize an example of the `beats’ phenomenon we first saw on Section 8.2.1. Indeed, using a sum to product identity, we may rewrite as  . As we saw in Section 8.2.1 (and Exercises 122 – 125 in Section 8.2), the lower frequency factor,
. As we saw in Section 8.2.1 (and Exercises 122 – 125 in Section 8.2), the lower frequency factor,  determines the `wave-envelope,’
determines the `wave-envelope,’  .
.

This equation of motion also results from `forced’ motion, but here the frequency of the external oscillation is different than that of the object on the spring. The sinusoids here have different frequencies, so they are `out of sync’ and do not amplify each other as in the previous example. Instead, through a combination of constructive and destructive interference, the mass continues to oscillate no more than  units from its equilibrium position indefinitely.
units from its equilibrium position indefinitely.
8.3.4 Section Exercises
In Exercises 1 – 20, solve the equation using the techniques discussed in Example 8.3.1 then approximate the solutions which lie in the interval to four decimal places.




















In Exercises 21 – 38, compute all of the exact solutions of the equation and then list those solutions which are in the interval .


















In Exercises 39 – 62, solve the equation, giving the exact solutions which lie in .
























In Exercises 63 – 78, solve the equation, giving the exact solutions which lie in 
















In Exercises 79 – 88, solve the equation.










- (a) With the help of your classmates, determine the number of solutions to in . Then find the number of solutions to
 , and
, and  in . What pattern emerges? Explain how this pattern would help you solve equations like
in . What pattern emerges? Explain how this pattern would help you solve equations like  .
.
(b) Repeat the above exercise focusing on ,
,  and
and  . What pattern emerges here?
. What pattern emerges here?
(c) Replace sine with tangent and with  and repeat the whole exploration.
and repeat the whole exploration. - Suppose an object weighing pounds is suspended from the ceiling by a spring which stretches feet to its equilibrium position when the object is attached.
- Find the spring constant in
 and the mass of the object in slugs.
and the mass of the object in slugs. - Find the equation of motion of the object if it is released from foot below the equilibrium position from rest. When is the first time the object passes through the equilibrium position? In which direction is it heading?
- Find the equation of motion of the object if it is released from
 inches above the equilibrium position with a downward velocity of feet per second. Find when the object passes through the equilibrium position heading downwards for the third time.
inches above the equilibrium position with a downward velocity of feet per second. Find when the object passes through the equilibrium position heading downwards for the third time.
- Find the spring constant
Section 8.3 Exercise Answers can be found in the Appendix … Coming soon
- Don't forget to divide the by as well! ↵
- On many calculators, there is no function button for cotangent. In that case, we would use the quotient identity and graph
 instead. The reader is invited to see what happens if we would graph
instead. The reader is invited to see what happens if we would graph  instead. ↵
instead. ↵ - Note that we do not list
 as part of the solution over the interval because is not in . ↵
as part of the solution over the interval because is not in . ↵ - See Section 0.5.5 for a review of this concept. ↵
- We invite the reader to try the `polynomial approach' used in the previous problem to see what difficulties are encountered. ↵
- A product equaling zero means, necessarily, one or both factors is 0. See Section 0.1.1. ↵
- As always, when in doubt, write it out! ↵
- We've seen how squaring both sides can lead to extraneous solutions in Section 0.2 and Chapter 4. Here, squaring both sides admits an entire family of extraneous solutions. ↵
- Well, assuming the object isn't subjected to relativistic speeds
 ↵
↵ - This is a consequence of Newton's Second Law of Motion
 where is force, is mass and
where is force, is mass and  is acceleration. In our present setting, the force involved is weight which is caused by the acceleration due to gravity. ↵
is acceleration. In our present setting, the force involved is weight which is caused by the acceleration due to gravity. ↵ - Note that pound
 and 1 Newton
and 1 Newton  . ↵
. ↵ - To keep units compatible, if we are using the English system, we use feet (ft.) to measure displacement. If we are in the SI system, we measure displacement in meters (m). Time is always measured in seconds (s). ↵
- The sign conventions here are carried over from Physics. If not for the spring, the object would fall towards the ground, which is the `natural' or `positive' direction. Because the spring force acts in direct opposition to gravity, any movement upwards is considered `negative'. ↵
- For confirmation, we note that , which in this case reduces to
 . ↵
. ↵ - Take a good Differential Equations class to see this! ↵
- This is the same sort of phenomenon we saw in Section 8.2.1. ↵
- The reader is invited to investigate the destructive implications of resonance. ↵
