
9.2 Dot Products and Projections
In Section 9.1, we learned how add and subtract vectors and how to multiply vectors by scalars. In this section, we define a product of vectors. We begin with the following definition.
![\[ \vec{v} \cdot \vec{w} = \left<v_{1},v_{2}\right> \cdot \left<w_{1},w_{2}\right> = v_{1}w_{1} + v_{2}w_{2} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-29b524bd008ec828cd91df0297ba9a0e_l3.png "Rendered by QuickLaTeX.com")
For example, if  and
and  ,then
,then
![\[ \begin{array}{rcl} \vec{v} \cdot \vec{w} &=& \left<3,4\right> \cdot \left<1,-2\right>\\ &=& (3)(1) + (4)(-2) \\ &=& -5 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-943c7472a88d9d9ee05870540a5e7f8d_l3.png "Rendered by QuickLaTeX.com")
Note that the dot product takes two vectors and produces a scalar. For that reason, the quantity  is often called the scalar product of
is often called the scalar product of  and
and  . The dot product enjoys the following properties.
. The dot product enjoys the following properties.
Theorem 9.5 Properties of the Dot Product
- Commutative Property: For all vectors and ,

- Distributive Property: For all vectors
 , and ,
, and , 
- Scalar Property: For all vectors and and scalars
 ,
, 
- Relation to Magnitude: For all vectors ,

Like most of the theorems involving vectors, the proof of Theorem 9.5 amounts to using the definition of the dot product and properties of real number arithmetic.
For example, to show the commutative property, let  and
and  . Then
. Then
![\[ \begin{array}{rcll} \vec{v} \cdot \vec{w} & = & \left<v_{1},v_{2}\right> \cdot \left<w_{1},w_{2}\right> & \\ [3pt] & = & v_{1}w_{1} + v_{2}w_{2} & \text{Definition of Dot Product} \\ [3pt] & = & w_{1}v_{1} + w_{2}v_{2} & \text{Commutativity of Real Number Multiplication} \\ [3pt] & = & \left<w_{1},w_{2}\right> \cdot \left<v_{1},v_{2}\right> & \text{Definition of Dot Product} \\ [3pt] & = & \vec{w} \cdot \vec{v} & \\ \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-354d5dbc34bba7637014d10ae7a0599c_l3.png "Rendered by QuickLaTeX.com")
The distributive property is proved similarly and is left as an exercise.
For the scalar property, assume that and and is a scalar. Then
![\[ \begin{array}{rcll} (k\vec{v}) \cdot \vec{w} & = & \left(k \left<v_{1},v_{2}\right> \right) \cdot \left<w_{1},w_{2}\right> & \\ [3pt] & = & \left<kv_{1},kv_{2}\right> \cdot \left<w_{1},w_{2}\right> & \text{Definition of Scalar Multiplication} \\ [3pt] & = & (kv_{1})(w_{1}) + (kv_{2})(w_{2}) & \text{Definition of Dot Product} \\ [3pt] & = & k(v_{1}w_{1}) + k(v_{2}w_{2}) & \text{Associativity of Real Number Multiplication} \\ [3pt] & = & k(v_{1}w_{1} + v_{2}w_{2}) & \text{Distributive Law of Real Numbers} \\ [3pt] & = & k \left<v_{1},v_{2}\right> \cdot \left<w_{1},w_{2}\right> & \text{Definition of Dot Product} \\ [3pt] & = & k (\vec{v} \cdot \vec{w}) & \\ \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-ddcaeb25e33c467bd59997699bb6b814_l3.png "Rendered by QuickLaTeX.com")
We leave the proof of  as an exercise.
as an exercise.
For the last property, we note that if , then  , where the last equality comes courtesy of Definition 9.4.
, where the last equality comes courtesy of Definition 9.4.
The following example puts Theorem 9.5 to good use. As in Example 9.2.1, we work out the problem in great detail and encourage the reader to supply the justification for each step.
Example 9.2.1
Example 9.2.1
Prove the identity:  .
.
Solution:
We begin by rewriting  in terms of the dot product using Theorem 9.5.
in terms of the dot product using Theorem 9.5.
![\[ \begin{array}{rcl} \| \vec{v} - \vec{w} \|^2 & = & (\vec{v} - \vec{w}) \cdot (\vec{v} - \vec{w}) \\ [3pt] & = & (\vec{v} + [-\vec{w}]) \cdot (\vec{v} + [-\vec{w}]) \\ [3pt] & = & (\vec{v} + [-\vec{w}]) \cdot \vec{v} +(\vec{v} + [-\vec{w}]) \cdot [-\vec{w}] \\ [3pt] & = & \vec{v} \cdot (\vec{v} + [-\vec{w}]) + [-\vec{w}] \cdot (\vec{v} + [-\vec{w}]) \\ [3pt] & = & \vec{v} \cdot \vec{v} + \vec{v} \cdot [-\vec{w}] + [-\vec{w}]\cdot \vec{v} + [-\vec{w}]\cdot[-\vec{w}] \\ [3pt] & = & \vec{v} \cdot \vec{v} + \vec{v} \cdot [(-1)\vec{w}] + [(-1)\vec{w}]\cdot \vec{v} + [(-1)\vec{w}]\cdot[(-1)\vec{w}] \\ [3pt] & = & \vec{v} \cdot \vec{v} + (-1)(\vec{v} \cdot \vec{w}) + (-1)(\vec{w} \cdot \vec{v}) + [(-1)(-1)](\vec{w}\cdot\vec{w}) \\ [3pt] & = & \vec{v} \cdot \vec{v} + (-1)(\vec{v} \cdot \vec{w}) + (-1)(\vec{v} \cdot \vec{w}) + \vec{w}\cdot\vec{w} \\ [3pt] & = & \vec{v} \cdot \vec{v} -2(\vec{v} \cdot \vec{w}) + \vec{w}\cdot\vec{w} \\ [3pt] & = & \|\vec{v}\|^2-2(\vec{v} \cdot \vec{w}) + \|\vec{w}\|^2 \\ \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-fb1fa81d9cfc5feb4488662a9d130070_l3.png "Rendered by QuickLaTeX.com")
Hence, as required.
If we take a step back from the pedantry in Example 9.2.1, we see that the bulk of the work is needed to show that  . If this looks familiar, it should.
. If this looks familiar, it should.
As the dot product enjoys many of the same properties enjoyed by real numbers, the machinations required to expand  for vectors and match those required to expand
for vectors and match those required to expand  for real numbers
for real numbers  and
and  , and hence we get similar looking results.
, and hence we get similar looking results.
The identity verified in Example 9.2.1 plays a large role in the development of the geometric properties of the dot product, which we now explore.
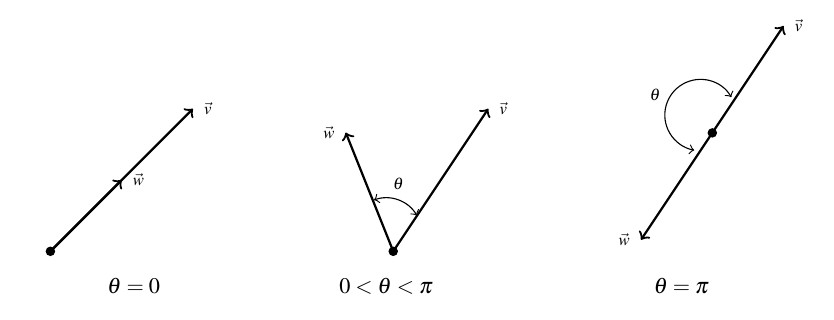
Suppose and are two nonzero vectors. If we draw and with the same initial point, we define the angle between and to be the angle  determined by the rays containing the vectors and , as illustrated below. We require
determined by the rays containing the vectors and , as illustrated below. We require  . (Think about why this is needed in the definition.)
. (Think about why this is needed in the definition.)
The following theorem gives us some insight into the geometric role the dot product plays.
Theorem 9.6 Geometric Interpretation of Dot Product
If and are nonzero vectors then
![\[ \vec{v} \cdot \vec{w} = \|\vec{v}\| \|\vec{w}\| \cos(\theta),\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-e76458eb7ce26ba753c01a1ccb5c1435_l3.png "Rendered by QuickLaTeX.com")
where is the angle between and .
We prove Theorem 9.6 in cases. If  , then and have the same direction. It follows[1] that there is a real number
, then and have the same direction. It follows[1] that there is a real number  such that
such that  . Hence,
. Hence,
![\[\vec{v} \cdot \vec{w} = \vec{v} \cdot (k \vec{v}) = k (\vec{v} \cdot \vec{v}) = k \| \vec{v} \|^2\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-25835d8f34e5afe030b97a9ba48214e5_l3.png "Rendered by QuickLaTeX.com")
Working from the other end of the equation,
![\[ \begin{array}{rcl} \| \vec{v} \| \| \vec{w} \| \cos(\theta) &=& \| \vec{v} \| \|k \vec{v} \| \cos(0) \\ &=& \| \vec{v} \| (|k| \| \vec{v} \|) (1) \\ &=& k \| \vec{v} \|^2 \end{array}\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-65f22e4c06c630a399e3e85ecf2b5f61_l3.png "Rendered by QuickLaTeX.com")
where  courtesy of Theorem 9.3, and
courtesy of Theorem 9.3, and  because
because 
Hence, in the case , we have shown  and
and  . Putting these two equations together shows that
. Putting these two equations together shows that
![\[\vec{v} \cdot \vec{w} = \|\vec{v}\| \|\vec{w}\| \cos(\theta) \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-ed4623db38671e9e5aa22d516e950481_l3.png "Rendered by QuickLaTeX.com")
holds in this case.
If  , and have the exact opposite directions, so there is a real number
, and have the exact opposite directions, so there is a real number  with .
with .
As before, we compute  . Because here, we have
. Because here, we have  . Hence, we find
. Hence, we find
![\[ \begin{array}{rcl} \| \vec{v} \| \| \vec{w} \| \cos(\theta) &=& \| \vec{v} \| \| k \vec{v} \| \cos(\pi) \\ &=& \| \vec{v} \| (|k| \| \vec{v} \|) (-1) \\ &=& \| \vec{v} \| (-k) \| \vec{v} \| (-1)\\ &=& k \| \vec{v} \|^2 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-68dafdade9c6b224ae916e508031402d_l3.png "Rendered by QuickLaTeX.com")
Once again, both and , so  in this case.
in this case.
Next, if  , the vectors , and
, the vectors , and  determine a triangle with side lengths
determine a triangle with side lengths  ,
,  and
and  , respectively, as seen in the diagram below.
, respectively, as seen in the diagram below.
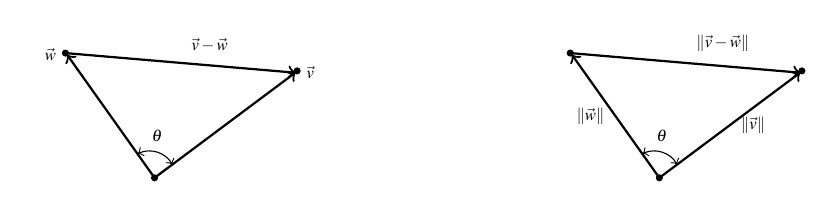
The Law of Cosines yields  .
.
From Example 9.2.1, we also have that 
Equating these two expressions for gives
![\[ \begin{array}{rcl} \|\vec{v}\|^2 + \|\vec{w}\|^2 - 2\|\vec{v}\| \|\vec{w}\| \cos(\theta) &=& \|\vec{v}\|^2 -2 (\vec{v} \cdot \vec{w}) + \|\vec{w}\|^2 \\[4pt] - 2\|\vec{v}\| \|\vec{w}\| \cos(\theta) \\[4pt] &=& -2 (\vec{v} \cdot \vec{w}) \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-74056250b3d72b6bf1a256c42f30fd5e_l3.png "Rendered by QuickLaTeX.com")
Hence, , as required.
An immediate consequence of Theorem 9.6 is the following.
![\[ \theta = \arccos\left( \dfrac{\vec{v} \cdot \vec{w}}{\| \vec{v} \| \|\vec{w} \|}\right) = \arccos(\bm\hat{v} \cdot \bm\hat{w}) \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-5322c9309a5dc6c299132d2bd4cec18b_l3.png "Rendered by QuickLaTeX.com")
We obtain the formula in Theorem 9.7 by solving the equation given in Theorem 9.6 for 
As and are nonzero, so are and  . Hence, we may divide both sides of
. Hence, we may divide both sides of  by
by  . Given by definition, the values of exactly match the range of the arccosine function. Hence,
. Given by definition, the values of exactly match the range of the arccosine function. Hence,
![\[ \cos(\theta) = \frac{\vec{v} \cdot \vec{w}}{\| \vec{v} \| \|\vec{w} \|} \, \Rightarrow \, \theta = \arccos\left( \frac{\vec{v} \cdot \vec{w}}{\| \vec{v} \| \|\vec{w} \|}\right).\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-9e8bd9421fa0b2e47f32fc5fae0ab28f_l3.png "Rendered by QuickLaTeX.com")
Using Theorem 9.5, we can rewrite
![\[ \begin{array}{rcl} \frac{\vec{v} \cdot \vec{w}}{\| \vec{v} \| \|\vec{w} \|} &=& \left(\frac{1}{\|\vec{v}\|} \vec{v}\right) \cdot \left(\frac{1}{\|\vec{w}\|} \vec{w}\right) \\[10pt] &=& \bm\hat{v} \cdot \bm\hat{w} \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-9f35f1ea326fa78d972b15a9b219e858_l3.png "Rendered by QuickLaTeX.com")
giving us the alternative formula listed in Theorem 9.7: 
We are overdue for an example.
Example 9.2.2
Example 9.2.2.1
Compute the angle between the following pairs of vectors. Graph each pair of vectors in standard position to check the reasonableness of your answer.
 , and
, and 
Solution:
We use the formula  from Theorem 9.7 in each case below.
from Theorem 9.7 in each case below.
Compute the angle between , and 
We have
![\[ \begin{array}{rcl} \vec{v} \cdot \vec{w} &=& \left< 3, -3\sqrt{3} \right> \cdot \left<-\sqrt{3}, 1 \right> \\ & =& -3\sqrt{3} - 3\sqrt{3} \\ &=& -6\sqrt{3} \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-0cf051f5dc0f9e278a04ca2d2d5c90bc_l3.png "Rendered by QuickLaTeX.com")
Computing the length of each vector, we find
![\[ \begin{array}{rcl} \| \vec{v} \| &=& \sqrt{3^2+(-3\sqrt{3})^2}\\[4pt] &=& \sqrt{36} \\[4pt] &=& 6 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-3589d2c679b2bb768c9c7cb5a1f6afec_l3.png "Rendered by QuickLaTeX.com")
and
![\[ \begin{array}{rcl} \| \vec{w}\| &=& \sqrt{(-\sqrt{3})^2+1^2} \\[4pt] &=& \sqrt{4} \\[4pt] &=& 2 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-56d62a91f1de2406e77b61eca2897aae_l3.png "Rendered by QuickLaTeX.com")
Hence, we find
![\[ \begin{array}{rcl} \theta &=& \arccos\left(\frac{-6\sqrt{3}}{12}\right) \\[4pt] &=& \arccos\left(-\frac{\sqrt{3}}{2}\right) \\[4pt] &=& \frac{5\pi}{6} \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-f2f2ef39214964233975a45f4c13b6a9_l3.png "Rendered by QuickLaTeX.com")
We check our answer geometrically by graphing this pair of vectors.
 </p>
</p>
Example 9.2.2.2
Compute the angle between the following pairs of vectors. Graph each pair of vectors in standard position to check the reasonableness of your answer.
 , and
, and 
Solution:
We use the formula from Theorem 9.7 in each case below.
Compute the angle between , and .
For and , we find
![\[ \begin{array}{rcl} \vec{v} \cdot \vec{w} &=& \left< 2, 2 \right> \cdot \left<5, -5\right>\\ &=& 10-10 \\ &=& 0 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-f16ef2812b711081e3b6b574cf2d22c7_l3.png "Rendered by QuickLaTeX.com")
Hence, it doesn’t matter what and are,
![\[ \begin{array}{rcl} \theta &=& \arccos\left( \frac{\vec{v} \cdot \vec{w}}{\| \vec{v} \| \|\vec{w} \|}\right) \\[10pt] &=& \arccos(0) \\[4pt] &=& \frac{\pi}{2} \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-72c652a8fabf5a280a372768f022c950_l3.png "Rendered by QuickLaTeX.com")
We check our answer geometrically by graphing this pair of vectors.

Example 9.2.2.3
Compute the angle between the following pairs of vectors. Graph each pair of vectors in standard position to check the reasonableness of your answer.
 , and
, and 
Solution:
We use the formula from Theorem 9.7 in each case below.
Compute the angle between , and .
We find
![\[ \begin{array}{rcl} \vec{v} \cdot \vec{w} &=& \left< 3, -4 \right> \cdot \left<2, 1\right>\\ &=& 6 - 4 \\ &=& 2 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-8a42eb1bb6ecf05e7cb405fa28c97459_l3.png "Rendered by QuickLaTeX.com")
Computing lengths, we find
![\[ \begin{array}{rcl} \| \vec{v} \| &=& \sqrt{3^2+(-4)^2}\\[4pt] &=& \sqrt{25} \\ &=& 5 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-b35751ecd868f9d248754199a14e78e8_l3.png "Rendered by QuickLaTeX.com")
and
![\[ \begin{array}{rcl} \vec{w} &=& \sqrt{2^2+1^2}\\[4pt] &=& \sqrt{5} \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-762d9a038fb3f53b82165881eb13eb15_l3.png "Rendered by QuickLaTeX.com")
and as a result
![\[ \begin{array}{rcl} \theta &=& \arccos\left(\frac{2}{5\sqrt{5}}\right)\\[10pt] &=& \arccos\left(\frac{2\sqrt{5}}{25} \right) \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-188c440ec633d122e58f8c7d97cb3edf_l3.png "Rendered by QuickLaTeX.com")
As  isn’t the cosine of one of the `common angles,’ we leave our exact answer in terms of the arccosine function. For the purposes of checking our answer, however, we approximate
isn’t the cosine of one of the `common angles,’ we leave our exact answer in terms of the arccosine function. For the purposes of checking our answer, however, we approximate  .
.

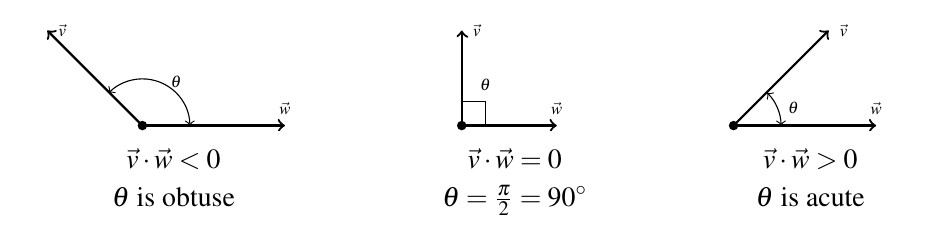
A few remarks about Example 9.2.2 are in order. Note that for nonzero vectors and , the lengths and are always positive. Theorem 9.6 tells us that  , thus we know the sign of is the same as the sign of
, thus we know the sign of is the same as the sign of 
Geometrically, if  , then
, then  so is an obtuse angle, demonstrated in number 1 above.
so is an obtuse angle, demonstrated in number 1 above.
If  , then
, then  so
so  as in number 2. In this case, the vectors and are called orthogonal. Geometrically, when orthogonal vectors are sketched with the same initial point, the lines containing the vectors are perpendicular. Hence, if and are orthogonal, we write
as in number 2. In this case, the vectors and are called orthogonal. Geometrically, when orthogonal vectors are sketched with the same initial point, the lines containing the vectors are perpendicular. Hence, if and are orthogonal, we write 
Note there is no `zero product property’ for the dot product. As with the vectors in number 2 above, it is quite possible to have but neither nor be 
Finally, if  , then
, then  so is an acute angle, as in the case of number 3 above.
so is an acute angle, as in the case of number 3 above.
We summarize all of our observations in the schematic below.
Of the three cases diagrammed above, the one which has the most mathematical significance moving forward is the orthogonal case. Hence, we state the corresponding theorem below.
Basically, Theorem 9.8 tells us that `the dot product detects orthogonality.’ This is a helpful interpretation to keep in mind as you continue your study of vectors in later courses.
We have already argued one direction of Theorem 9.8, namely if then  in the comments following Example 9.2.2.
in the comments following Example 9.2.2.
To show the converse, we note if , then the angle between and , . From Theorem 9.6, we have that  , as required.
, as required.
We can use Theorem 9.8 in the following example to provide a different proof about the relationship between the slopes of perpendicular lines.[2]
Example 9.2.3
Example 9.2.3
Let  be the line
be the line  and let
and let  be the line
be the line  . Prove that is perpendicular to if and only if
. Prove that is perpendicular to if and only if  .
.
Solution:
Our strategy is to find two vectors:  , which has the same direction as , and
, which has the same direction as , and  , which has the same direction as and show
, which has the same direction as and show  if and only if
if and only if 
To that end, we substitute  and
and  into to find two points which lie on , namely
into to find two points which lie on , namely  and
and  .
.
We let  . Because is determined by two points on , it may be viewed as lying on , so has the same direction as
. Because is determined by two points on , it may be viewed as lying on , so has the same direction as 
Similarly, we get the vector  which has the same direction as the line . Hence, and are perpendicular if and only if . According to Theorem 9.8, if and only if
which has the same direction as the line . Hence, and are perpendicular if and only if . According to Theorem 9.8, if and only if 
Notice that  . Hence,
. Hence,  if and only if
if and only if  , which is true if and only if
, which is true if and only if  , as required.
, as required.
9.2.1 Vector Projections
While Theorem 9.8 certainly gives us some insight into what the dot product means geometrically, there is more to the story of the dot product. Consider the two nonzero vectors and drawn with a common initial point  below. For the moment, assume that the angle between and , , is acute.
below. For the moment, assume that the angle between and , , is acute.
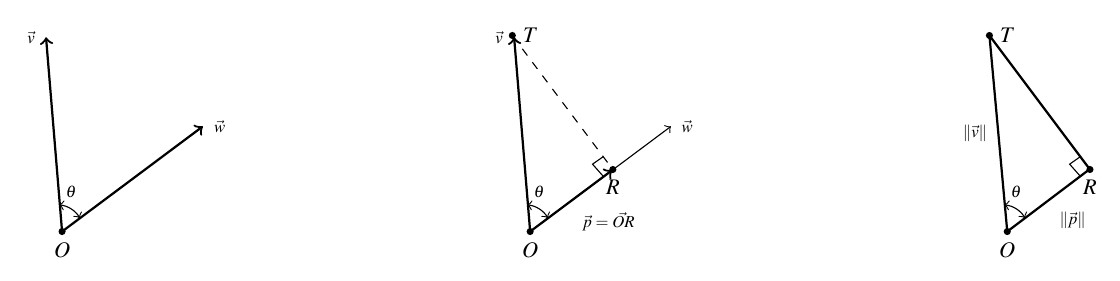
We wish to develop a formula for the vector  , indicated below, which is called the orthogonal projection of
, indicated below, which is called the orthogonal projection of  onto
onto  The vector is obtained geometrically as follows: drop a perpendicular from the terminal point
The vector is obtained geometrically as follows: drop a perpendicular from the terminal point  of to the vector and call the point of intersection
of to the vector and call the point of intersection  . The vector is then defined as
. The vector is then defined as 
Like any vector, is determined by its magnitude  and its direction
and its direction  according to the formula
according to the formula  . Because we want to have the same direction as , we have
. Because we want to have the same direction as , we have 
To determine , we apply Definition 7.2 to the right triangle  . We find
. We find  , or, equivalently,
, or, equivalently,  . Using Theorems 9.6 and 9.5, we get:
. Using Theorems 9.6 and 9.5, we get:
![\[ \begin{array}{rcl} \| \vec{p} \| &=& \| \vec{v} \| \cos(\theta)\\[4pt] &=& \frac{ \| \vec{v} \| \| \vec{w} \| \cos(\theta)}{\| \vec{w} \|}\\[8pt] &=& \frac{\vec{v} \cdot \vec{w}}{\|\vec{w}\|}\\[8pt] &=& \vec{v} \cdot \left(\frac{1}{\|\vec{w}\|} \vec{w}\right)\\[10pt] &=& \vec{v} \cdot \bm\hat{w} \end{array}\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-4921172837aa89ce9e9c2969c702aec0_l3.png "Rendered by QuickLaTeX.com")
Hence,  , and as
, and as  , we have
, we have
![\[ \begin{array}{rcl} \vec{p} &=& \| \vec{p} \| \bm\hat{p} \\ &=& (\vec{v} \cdot \bm\hat{w}) \bm\hat{w} \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-04f313bc84abc8eb50539af2d189023c_l3.png "Rendered by QuickLaTeX.com")
Now suppose that the angle between and is obtuse, and consider the diagram below.
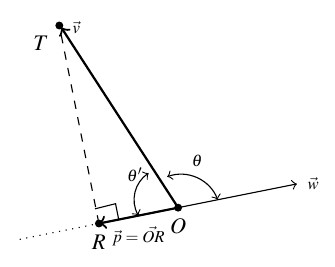
In this case, we see that  and using the triangle , we find
and using the triangle , we find  . Because
. Because  , it follows that
, it follows that  , which means
, which means
![\[ \| \vec{p} \| = \| \vec{v} \| \cos(\theta') = - \| \vec{v} \| \cos(\theta). \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-8c6333e1b3c35ce22d0130878b542278_l3.png "Rendered by QuickLaTeX.com")
Rewriting this last equation in terms of and as before, we get  . Putting this together with , we get
. Putting this together with , we get
![\[ \begin{array}{rcl} \vec{p} &=& \| \vec{p} \| \bm\hat{p}\\ &=& -(\vec{v} \cdot \bm\hat{w}) (-\bm\hat{w}) \\ &=& (\vec{v} \cdot \bm\hat{w}) \bm\hat{w} \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-7ec4414df8faf38af87e5b6080feb05e_l3.png "Rendered by QuickLaTeX.com")
in this case as well.
If the angle between and is  then it is easy to show[3] that
then it is easy to show[3] that  . Because in this case, . It follows that
. Because in this case, . It follows that  and
and  in this case, too. We have motivated the following.
in this case, too. We have motivated the following.
Definition 9.8
Let and be nonzero vectors.
The orthogonal projection of onto  denoted
denoted  is given by
is given by 
Definition 9.8 gives us a good idea what the dot product does. The scalar  is a measure of how much of the vector is in the direction of the vector and is thus called the scalar projection of onto
is a measure of how much of the vector is in the direction of the vector and is thus called the scalar projection of onto 
While the formula given in Definition 9.8 is theoretically appealing, because of the presence of the normalized unit vector  , computing the projection using the formula
, computing the projection using the formula  can be messy. We present two other formulas that are often used in practice.
can be messy. We present two other formulas that are often used in practice.
![\[\text{proj}_{\vec{w}}(\vec{v}) = (\vec{v} \cdot \bm\hat{w}) \bm\hat{w} = \left(\dfrac{\vec{v} \cdot \vec{w}}{\| \vec{w}\|^2}\right) \vec{w} = \left(\dfrac{\vec{v} \cdot \vec{w}}{\vec{w} \cdot \vec{w}}\right) \vec{w} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-47bb5d73b02b17ed5c89cb8c3f67ec0c_l3.png "Rendered by QuickLaTeX.com")
The proof of Theorem 9.9, which we leave to the reader as an exercise, amounts to using the formula  and properties of the dot product. It is time for an example.
and properties of the dot product. It is time for an example.
Example 9.2.4
Example 9.2.4
Let  and
and  . Determine
. Determine  . Check your answer geometrically.
. Check your answer geometrically.
Solution:
We find
![\[\vec{v} \cdot \vec{w} = \left<1,8\right> \cdot \left<-1,2\right> = (-1) + 16 = 15 \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-49d9634c0034642516cd53a84294c86f_l3.png "Rendered by QuickLaTeX.com")
and
![\[ \vec{w} \cdot \vec{w} = \left<-1,2\right> \cdot \left<-1,2\right> = 1 + 4 = 5\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-813d43997e4d9aeb8b3819776905bfde_l3.png "Rendered by QuickLaTeX.com")
Hence,
![\[ \begin{array}{rcl} \vec{p} &=& \frac{\vec{v} \cdot \vec{w}}{\vec{w} \cdot \vec{w}} \vec{w} \\[10pt] &=& \frac{15}{5} \left<-1,2\right>\\[10pt] &=& \left<-3,6\right> \end{array}\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-86742669b5b5178674476480f42e2811_l3.png "Rendered by QuickLaTeX.com")
We plot , and in standard position below on the left. We see has the same direction as , but we need to do more to show in is indeed the orthogonal projection of onto .
Consider the vector  whose initial point is the terminal point of and whose terminal point is the terminal point of . From the definition of vector arithmetic,
whose initial point is the terminal point of and whose terminal point is the terminal point of . From the definition of vector arithmetic,  , so that
, so that  .
.
For and  , then
, then 
To prove  , we compute the dot product:
, we compute the dot product:
![\[ \begin{array}{rcl} \vec{q} \cdot \vec{w} &=& \left<4,2\right> \cdot \left<-1,2\right> \\ &=& (-4)+4 \\ &=& 0 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-a21f0fae93505e5022e6364959e62965_l3.png "Rendered by QuickLaTeX.com")
Hence, per Theorem 9.8, we know which completes our check.[4]

In Example 9.2.4 above, writing  is an example of what is called a vector decomposition of . We generalize this result in the following theorem.
is an example of what is called a vector decomposition of . We generalize this result in the following theorem.
Theorem 9.10 Generalized Decomposition Theorem
Let and be nonzero vectors. There are unique vectors and such that where  for some scalar , and
for some scalar , and 
If the vectors and in Theorem 9.10 are nonzero, then we can say is `parallel’[5] to and is `orthogonal’ to . In this case, the vector is sometimes called the `vector component of parallel to ‘ and is called the `vector component of orthogonal to .’
To prove Theorem 9.10, we take and . Then is, by definition, a scalar multiple of . Next, we compute 
![\[ \begin{array}{rcll} \vec{q} \cdot \vec{w} & = & (\vec{v} - \vec{p}) \cdot \vec{w}& \text{Definition of } \vec{q} \\ [3pt] & = & \vec{v} \cdot \vec{w} - \vec{p} \cdot \vec{w} & \text{Properties of Dot Product} \\ [8pt] & = & \vec{v} \cdot \vec{w} - \left(\dfrac{\vec{v} \cdot \vec{w}}{\vec{w} \cdot \vec{w}} \vec{w}\right) \cdot \vec{w} & \vec{p} = \text{proj}_{\vec{w}}(\vec{v}) \\ [8pt] & = & \vec{v} \cdot \vec{w} - \left(\dfrac{\vec{v} \cdot \vec{w}}{\vec{w} \cdot \vec{w}}\right) (\vec{w} \cdot \vec{w}) & \text{Properties of Dot Product} \\ [8pt] & = & \vec{v} \cdot \vec{w} - \vec{v}\cdot \vec{w} & \\ [3pt] & = & 0 & \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-bdfc04fc4aaccab83927ed12a07f8230_l3.png "Rendered by QuickLaTeX.com")
Hence,  , as required. At this point, we have shown that the vectors and guaranteed by Theorem 9.10 exist. Now we need to show that they are unique – that is, there is only one such way to decompose in the manner described in Theorem 9.10.
, as required. At this point, we have shown that the vectors and guaranteed by Theorem 9.10 exist. Now we need to show that they are unique – that is, there is only one such way to decompose in the manner described in Theorem 9.10.
Suppose  where the vectors
where the vectors  and
and  satisfy the same properties described in Theorem 9.10 as and . Then
satisfy the same properties described in Theorem 9.10 as and . Then  , so
, so
![\[ \begin{array}{rcl} \vec{w} \cdot (\vec{p} - \vec{p} \,') & =& \vec{w} \cdot (\vec{q} \,' - \vec{q}) \\ &=& \vec{w} \cdot \vec{q} \,' - \vec{w} \cdot \vec{q} \\ &=& 0 - 0 \\ &=& 0 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-62a20571ef983a01df373a1d24a56249_l3.png "Rendered by QuickLaTeX.com")
The long and short of this computation is that 
Now there are scalars and  so that and
so that and  . This means
. This means
![\[ \begin{array}{rcl} \vec{w} \cdot (\vec{p} - \vec{p} \,') &=& \vec{w} \cdot ( k \vec{w} - k \,' \vec{w}) \\ &=& \vec{w} \cdot ([k - k \,'] \vec{w}) \\ &=& (k - k \,') (\vec{w} \cdot \vec{w}) \\ &=& (k - k \,') \| \vec{w} \|^2 \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-f01865f7f6caf2fed7471c4027978e37_l3.png "Rendered by QuickLaTeX.com")
Because  ,
,  , which means the only way
, which means the only way  is for
is for  , or
, or  . \vskip 0.5em
. \vskip 0.5em
This means  . As
. As  , it must be that
, it must be that  as well.
as well.
Hence, we have shown there is only one way to write as a sum of vectors as described in Theorem 9.10, so the decomposition listed there is unique.
We close this section with an application of the dot product. In Physics, if a constant force  is exerted over a distance
is exerted over a distance  , the work
, the work  done by the force is given by
done by the force is given by  . Here, the assumption is that the force is being applied in the direction of the motion. If the force applied is not in the direction of the motion, we can use the dot product to find the work done.
. Here, the assumption is that the force is being applied in the direction of the motion. If the force applied is not in the direction of the motion, we can use the dot product to find the work done.
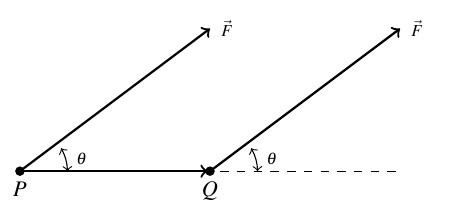
Consider the scenario sketched below in which the constant force  is applied to move an object from the point
is applied to move an object from the point  to the point
to the point  . Here the force is being applied at an angle as opposed to being applied directly in the direction of the motion.
. Here the force is being applied at an angle as opposed to being applied directly in the direction of the motion.
To find the work done in this scenario, we need to find how much of the force is in the direction of the motion  . This is precisely what the dot product
. This is precisely what the dot product  represents.
represents.
The distance the object travels is  , so we get
, so we get  . As
. As  , we can simplify this formula as follows:
, we can simplify this formula as follows: 
Using Theorem 9.6, we can rewrite  , where is the angle between the applied force and the trajectory of the motion . We have proved the following.
, where is the angle between the applied force and the trajectory of the motion . We have proved the following.
Theorem 9.11 Work as a Dot Product
Suppose a constant force is applied along the vector . The work done by is given by
![\[ W = \vec{F} \cdot \overrightarrow{PQ} = \| \vec{F} \| \| \overrightarrow{PQ} \| \cos(\theta),\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-d0d83a9b6db090ebe2086d889ad3acbf_l3.png "Rendered by QuickLaTeX.com")
where is the angle between and 
We test out our formula for work in the following example.
Example 9.2.5
Example 9.2.5
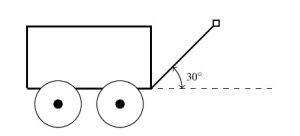
Taylor exerts a force of  pounds to pull her wagon a distance of
pounds to pull her wagon a distance of  feet over level ground. If the handle of the wagon makes a
feet over level ground. If the handle of the wagon makes a  angle with the horizontal, how much work did Taylor do pulling the wagon? Assume the force of pounds is exerted at a angle for the duration of the feet.
angle with the horizontal, how much work did Taylor do pulling the wagon? Assume the force of pounds is exerted at a angle for the duration of the feet.
Solution:
There are (at least) two ways to attack this problem. One way is to find the vectors and mentioned in Theorem 9.11 and compute  .
.
To do this, we assume the origin is at the point where the handle of the wagon meets the wagon and the positive  -axis lies along the dashed line in the figure above.
-axis lies along the dashed line in the figure above.
To find the force vector , we note the force in this situation is a constant 10 pounds, so  . Moreover, the force is being applied at a constant angle of
. Moreover, the force is being applied at a constant angle of  with respect to the positive -axis. Definition 9.4 gives us
with respect to the positive -axis. Definition 9.4 gives us
![\[ \begin{array}{rcl} \vec{F} &=& \| \vec{F} \| \left< \cos(\theta), \sin(\theta) \right>\\ &=& 10 \left<\cos(30^{\circ}), \sin(30^{\circ})\right>\\ &=& \left<5\sqrt{3}, 5\right> \end{array} \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-fafbb3c9dbdcc5dde273fbbdd32172e3_l3.png "Rendered by QuickLaTeX.com")
The wagon is being pulled along 50 feet in the positive -direction, so we find the displacement vector is
![\[ \overrightarrow{PQ} = 50 \bm\hat{\text{i}} = 50\left<1,0\right> = \left<50,0\right> \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-619a341521104d532162aedd40349492_l3.png "Rendered by QuickLaTeX.com")
Per Theorem 9.11,  .
.
Force is measured in pounds and distance is measured in feet, giving us  foot-pounds.
foot-pounds.
Alternatively, we can use the formula  . With
. With  pounds,
pounds,  feet and , we get
feet and , we get  foot-pounds of work.
foot-pounds of work.
9.2.2 Section Exercises
In Exercises 1 – 20, use the pair of vectors and to find the following quantities.
- The angle (in degrees) between and
 (Show that .)
(Show that .)
 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
- and

 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
 and
and 
- A force of
 pounds is required to tow a trailer. Find the work done towing the trailer along a flat stretch of road
pounds is required to tow a trailer. Find the work done towing the trailer along a flat stretch of road  feet. Assume the force is applied in the direction of the motion.
feet. Assume the force is applied in the direction of the motion. - Find the work done lifting a pound book
 feet straight up into the air. Assume the force of gravity is acting straight downwards.
feet straight up into the air. Assume the force of gravity is acting straight downwards. - Suppose Taylor fills her wagon with rocks and must exert a force of 13 pounds to pull her wagon across the yard. If she maintains a
 angle between the handle of the wagon and the horizontal, compute how much work Taylor does pulling her wagon 25 feet. Round your answer to two decimal places.
angle between the handle of the wagon and the horizontal, compute how much work Taylor does pulling her wagon 25 feet. Round your answer to two decimal places. - In Exercise 61 in Section 9.1, two drunken college students have filled an empty beer keg with rocks which they drag down the street by pulling on two attached ropes. The stronger of the two students pulls with a force of 100 pounds on a rope which makes a
 angle with the direction of motion. (In this case, the keg was being pulled due east and the student’s heading was N
angle with the direction of motion. (In this case, the keg was being pulled due east and the student’s heading was N E.) Find the work done by this student if the keg is dragged 42 feet.
E.) Find the work done by this student if the keg is dragged 42 feet. - Find the work done pushing a 200 pound barrel 10 feet up a
 incline. Ignore all forces acting on the barrel except gravity, which acts downwards. Round your answer to two decimal places.
incline. Ignore all forces acting on the barrel except gravity, which acts downwards. Round your answer to two decimal places.
HINT: Because you are working to overcome gravity only, the force being applied acts directly upwards. This means that the angle between the applied force in this case and the motion of the object is not the of the incline! - Prove the distributive property of the dot product in Theorem 9.5.
- Finish the proof of the scalar property of the dot product in Theorem 9.5.
- Show Theorem 9.10 reduces to Theorem 9.4 in the case

- Use the identity in Example 9.2.1 to prove the Parallelogram Law
![\[ \|\vec{v}\|^2 + \|\vec{w}\|^2 = \dfrac{1}{2}\left[ \| \vec{v} + \vec{w}\|^2 + \|\vec{v} - \vec{w}\|^2\right] \]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-58e05a41b0a11500c41aff15e0c84ca8_l3.png "Rendered by QuickLaTeX.com")
- We know that
 for all real numbers and
for all real numbers and  by the Triangle Inequality established in Exercise 55 in Section 1.4. We can now establish a Triangle Inequality for vectors. In this exercise, we prove that
by the Triangle Inequality established in Exercise 55 in Section 1.4. We can now establish a Triangle Inequality for vectors. In this exercise, we prove that  for all pairs of vectors and
for all pairs of vectors and 
- (Step 1) Show that
 .
. - (Step 2) Show that
 . This is the celebrated Cauchy-Schwarz Inequality.[6]
. This is the celebrated Cauchy-Schwarz Inequality.[6]
HINT: Start with and use the fact that
and use the fact that  for all .
for all . - (Step 3) Show:
![\[\| \vec{u} + \vec{v} \|^{2} = \| \vec{u} \|^{2} + 2\vec{u} \cdot \vec{v} + \| \vec{v} \|^{2} \leq \| \vec{u} \|^{2} + 2|\vec{u} \cdot \vec{v}| + \| \vec{v} \|^{2} \leq \| \vec{u} \|^{2} + 2\| \vec{u} \| \| \vec{v} \| + \| \vec{v} \|^{2} = (\| \vec{u} \| + \| \vec{v} \|)^{2}.\]](https://odp.library.tamu.edu/app/uploads/quicklatex/quicklatex.com-9b4fc427505a3ddcd87ff91a5c26911a_l3.png "Rendered by QuickLaTeX.com")
- (Step 4) Use Step 3 to show that for all pairs of vectors and .
- (Step 1) Show that
Section 9.2 Exercise Answers can be found in the Appendix … Coming soon
 and
and  , if
, if  then
then  . In this case,
. In this case, 
 .
.  as well!
as well! The product of two vectors
